


|
学习了前面提到的Arduino控制电机驱动及串口通讯、无线数传通讯的知识后,我们就可以来动动手了,制作一个款简易的电脑无线遥控履带小车。
APC220一对及USB串口转换器一个
Arduino控制器及扩展板各一个
DF-MDV1.2电机驱动一个、一小块压克力及螺钉螺母镙柱若干
履带小车一台及7.2或12V电池包一个 材料备齐立马开工:
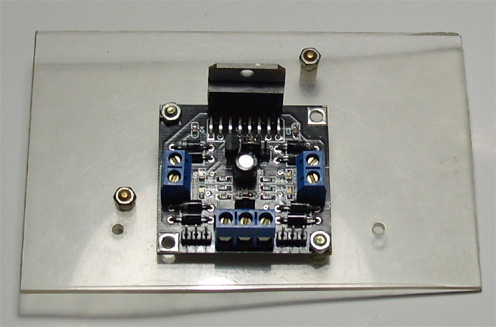
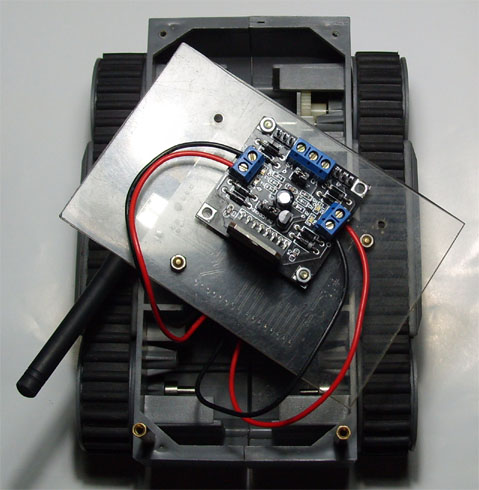
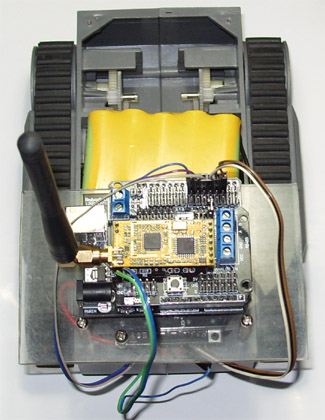
将DF-MDV1.2电机驱动安装在一个裁剪好的压克力背面,
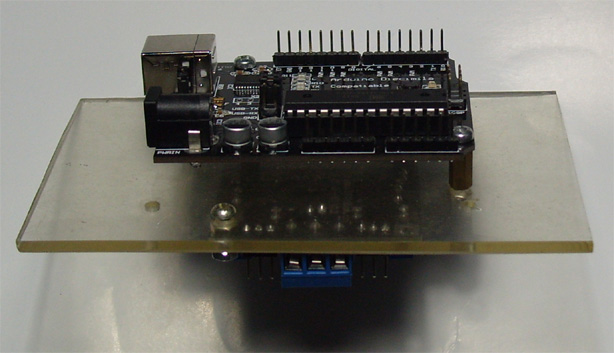
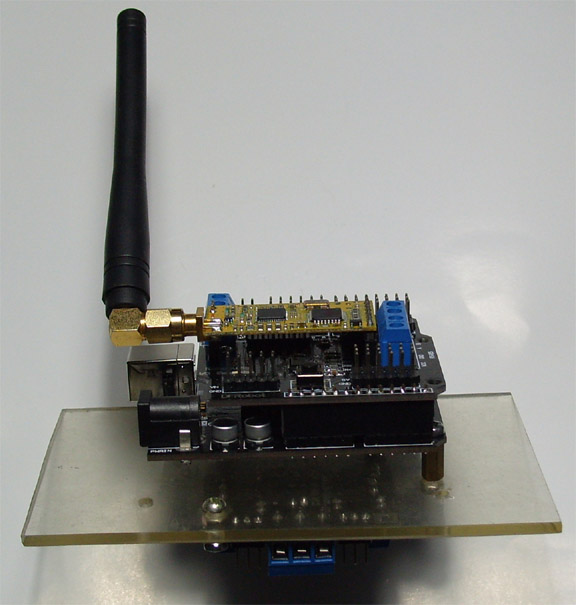
Arduino控制器安装在压克力正面,
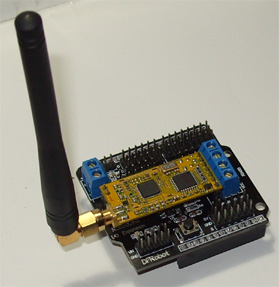
一只APC220插在Arduino扩展板上,
然后再将扩展板插到Arduino控制器上,
履带小车的电机线接到电机驱动板上,电机驱动板上的电机接线柱边画有一个圈,分别接2个电机相同颜色的引线,
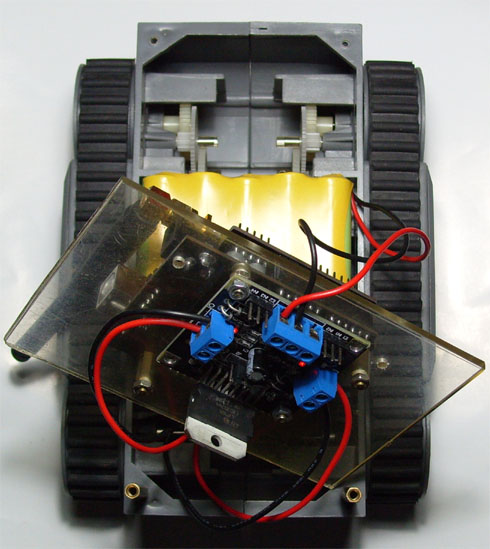
电池包殷勤地躺在履带怀中,触角却伸到了电机驱动板的电源接线柱上(酸啊。。。。),
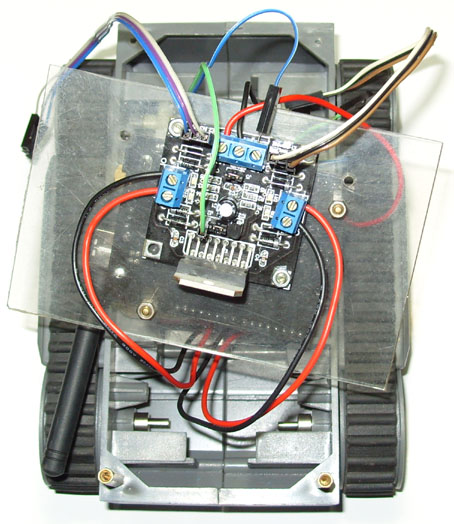
插上电机的6根控制线和2根给Arduino供电的电源线,
电机控制线和电源线接到Arduino上,硬件大功告成!
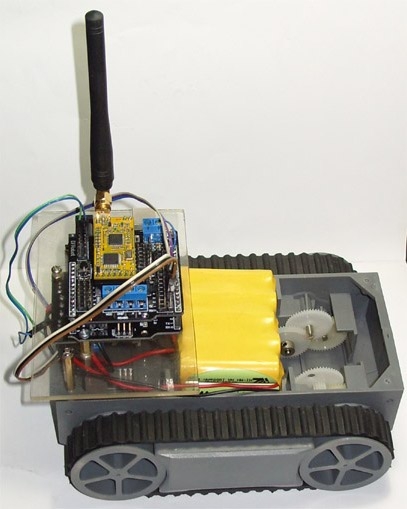
侧身摆了个pose。 另一只APC220插到电脑USB上,电机驱动接法如下:
电机驱动 Arduino 电脑无线遥控履带小车代码如下:
int IN1 = 2;
void back_off_l(void)
这个代码使用串口助手测试,分别发送字符w,s,a,d则表示前进,后退,左转,右转,有心的朋友可以搞个上位机,使用键盘的w,s,a,d来控制。 |



相关文章

发表评论: